In case you haven't stumbled upon it already,
I have moved to this domain. The migration is very recent.
*This website may not be update henceforth.
I have moved to this domain. The migration is very recent.
*This website may not be update henceforth.

|
Roboticist / TechGeek
Khush Agrawal Hi! I am undergraduate student in Electronics and Communication Engineering at Visvesvaraya National Institute of Technology, Nagpur. I have always been a tinkerer. Computers and Electronics fascinate me! This is my journey to explore robotics and make something which can contribute to progress. |
|
Vertical Divider
|
Skills
Robotics
Reinforcement Learning Deep Learning Embedded Systems Linux ExperienceChairman, IvLabs - VNIT Nagpur
Organized workshops under IEEE, VNIT Student's Chapter |

|
"Only one who wanders finds a new path"
Projects
|
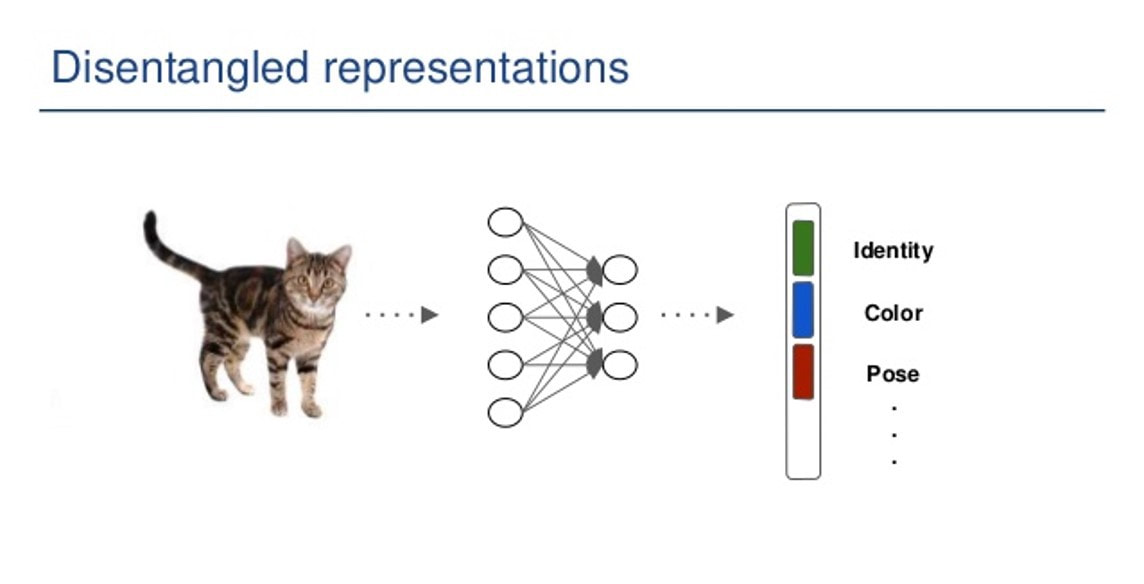
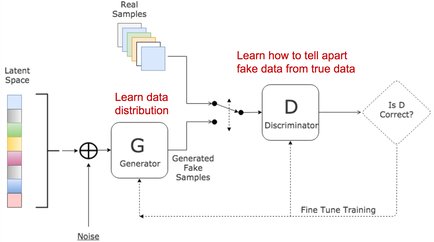
Generative Adversarial Networks
Generative adversarial networks are a class of artificial intelligence algorithms used in unsupervised machine learning, implemented by a system of two neural networks contesting with each other in a zero-sum game framework. GAN was tested on MNIST dataset. Cyclic GAN was tested on horse2zebra dataset. |
|
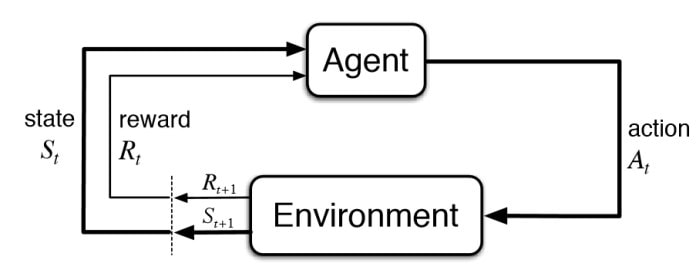
Pose Estimation of a Differential Drive Robot
An autonomous robot which can estimate it's position(abscissa and ordinate), and orientation(angle) in a 2-D space. Data received from encoders is processed on raspberry-pi using ROS. Complete processes is executed via three nodes position-estimation-node, encoder-node, teleop-motor-control-node. position-estimation-node subscribes to encoder-node and teleop-motor-control-node and prints localization data. teleop-motor-control-node control node controls robot using real-time keyboard control. encoder-node reads sensor values and publishes a message when counters increment. |
|
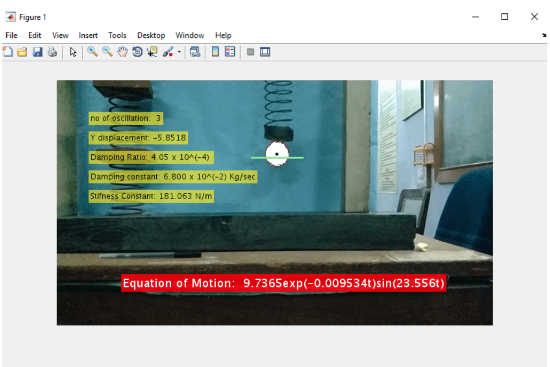
Harmonic Motion Analyzer
A video is selected to analyze its motion. Proper color threshold is set to identify the object and its centroid location is obtained. Every coordinate of the centroid is stored and later its extremum are calculated. All values are stored then in a csv file. Using elementary mathematics and retrieved data,an equation of motion is calculated. *this project was made for TechnoSeason, 2017 and was awarded first prize. |

|
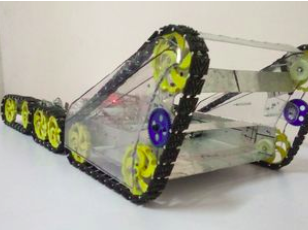
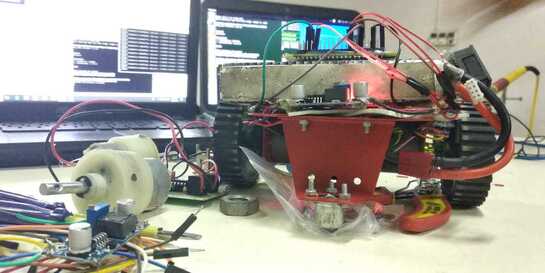
Terra-former Robot
A robot for moving objects. It is differential drive based Bluetooth controlled robot. A 3 DoF servo controlled arm is made with a gripper end effector for pick and place mechanism. 2 Arduinos are used for controlling arm and motion independently. A single channel relay is used for optimizing power consumption by switching off the arm when not in use. *This project was made for AXIS(Technical Event at NIT-Nagpur), 2017 and was awarded a prize for innovative design. |
